Флаг Красной армии Киевское высшее общевойсковое командное дважды...


Основные единицы измерения величин в системе СИ таковы:
При выполнении расчетов в системе СИ углы измеряются в радианах.
Если в задаче по физике не указано, в каких единицах нужно дать ответ, его нужно дать в единицах системы СИ или в производных от них величинах, соответствующих той физической величине, о которой спрашивается в задаче. Например, если в задаче требуется найти скорость, и не сказано в чем ее нужно выразить, то ответ нужно дать в м/с.
Для удобства в задачах по физике часто приходится использовать дольные (уменьшающие) и кратные (увеличивающие) приставки. их можно применять к любой физической величине. Например, мм – миллиметр, кт – килотонна, нс – наносекунда, Мг – мегаграмм, ммоль – миллимоль, мкА – микроампер. Запомните, что в физике не существует двойных приставок. Например, мкг – это микрограмм, а не милликилограмм. Учтите, что при сложении и вычитании величин Вы можете оперировать только величинами одинаковой размерности. Например, килограммы можно складывать только с килограммами, из миллиметров можно вычитать только миллиметры, и так далее. При переводе величин пользуйтесь следующей таблицей.
Кинематикой называют раздел механики, в котором движение тел рассматривается без выяснения причин этого движения.
Механическим движением тела называют изменение его положения в пространстве относительно других тел с течением времени.
Всякое тело имеет определенные размеры. Однако, во многих задачах механики нет необходимости указывать положения отдельных частей тела. Если размеры тела малы по сравнению с расстояниями до других тел, то данное тело можно считать материальной точкой . Так при движении автомобиля на большие расстояния можно пренебречь его длиной, так как длина автомобиля мала по сравнению с расстояниями, которое он проходит.
Интуитивно понятно, что характеристики движения (скорость, траектория и т.д.) зависят от того, откуда мы на него смотрим. Поэтому для описания движения вводится понятие системы отсчета. Система отсчета (СО) – совокупность тела отсчета (оно считается абсолютно твердым), привязанной к нему системой координат, линейки (прибора, измеряющего расстояния), часов и синхронизатора времени.
Перемещаясь с течением времени из одной точки в другую, тело (материальная точка) описывает в данной СО некоторую линию, которую называют траекторией движения тела .
Перемещением тела называют направленный отрезок прямой, соединяющий начальное положение тела с его конечным положением. Перемещение есть векторная величина. Перемещение может в процессе движения увеличиваться, уменьшаться и становиться равным нулю.
Пройденный путь равен длине траектории, пройденной телом за некоторое время. Путь – скалярная величина. Путь не может уменьшаться. Путь только возрастает либо остается постоянным (если тело не движется). При движении тела по криволинейной траектории модуль (длина) вектора перемещения всегда меньше пройденного пути.
При равномерном (с постоянной скоростью) движении путь L может быть найден по формуле:
где: v – скорость тела, t – время в течении которого оно двигалось. При решении задач по кинематике перемещение обычно находится из геометрических соображений. Часто геометрические соображения для нахождения перемещения требуют знания теоремы Пифагора.
Скорость – векторная величина, характеризующая быстроту перемещения тела в пространстве. Скорость бывает средней и мгновенной. Мгновенная скорость описывает движение в данный конкретный момент времени в данной конкретной точке пространства, а средняя скорость характеризует все движение в целом, в общем, не описывая подробности движения на каждом конкретном участке.
Средняя скорость пути – это отношение всего пути ко всему времени движения:
где: L полн – весь путь, который прошло тело, t полн – все время движения.
Средняя скорость перемещения – это отношение всего перемещения ко всему времени движения:

Эта величина направлена так же, как и полное перемещение тела (то есть из начальной точки движения в конечную точку). При этом не забывайте, что полное перемещение не всегда равно алгебраической сумме перемещений на определённых этапах движения. Вектор полного перемещения равен векторной сумме перемещений на отдельных этапах движения.
Ускорение – векторная физическая величина, определяющая быстроту изменения скорости тела. Ускорением тела называют отношение изменения скорости к промежутку времени, в течение которого происходило изменение скорости:
![]()
где: v 0 – начальная скорость тела, v – конечная скорость тела (то есть спустя промежуток времени t ).
Далее, если иное не указано в условии задачи, мы считаем, что если тело движется с ускорением, то это ускорение остается постоянным. Такое движение тела называется равноускоренным (или равнопеременным). При равноускоренном движении скорость тела изменяется на одинаковую величину за любые равные промежутки времени.
Равноускоренное движение бывает собственно ускоренным, когда тело увеличивает скорость движения, и замедленным, когда скорость уменьшается. Для простоты решения задач удобно для замедленного движения брать ускорение со знаком «–».
Из предыдущей формулы, следует другая более распространённая формула, описывающая изменение скорости со временем при равноускоренном движении:
Перемещение (но не путь) при равноускоренном движении рассчитывается по формулам:

![]()
В последней формуле использована одна особенность равноускоренного движения. При равноускоренном движении среднюю скорость можно рассчитывать, как среднее арифметическое начальной и конечной скоростей (этим свойством очень удобно пользоваться при решении некоторых задач):
С расчетом пути все сложнее. Если тело не меняло направления движения, то при равноускоренном прямолинейном движении путь численно равен перемещению. А если меняло – надо отдельно считать путь до остановки (момента разворота) и путь после остановки (момента разворота). А просто подстановка времени в формулы для перемещения в этом случае приведет к типичной ошибке.
Координата при равноускоренном движении изменяется по закону:

Проекция скорости при равноускоренном движении изменяется по такому закону:
![]()
Аналогичные формулы получаются для остальных координатных осей.
На все тела, находящиеся в поле тяготения Земли, действует сила тяжести. В отсутствие опоры или подвеса эта сила заставляет тела падать к поверхности Земли. Если пренебречь сопротивлением воздуха, то движение тел только под действием силы тяжести называется свободным падением. Сила тяжести сообщает любым телам, независимо от их формы, массы и размеров, одинаковое ускорение, называемое ускорением свободного падения. Вблизи поверхности Земли ускорение свободного падения составляет:
Это значит, что свободное падение всех тел вблизи поверхности Земли является равноускоренным (но не обязательно прямолинейным) движением. Вначале рассмотрим простейший случай свободного падения, когда тело движется строго по вертикали. Такое движение является равноускоренным прямолинейным движением, поэтому все изученные ранее закономерности и фокусы такого движения подходят и для свободного падения. Только ускорение всегда равно ускорению свободного падения.
Традиционно при свободном падении используют направленную вертикально ось OY. Ничего страшного здесь нет. Просто надо во всех формулах вместо индекса «х » писать «у ». Смысл этого индекса и правило определения знаков сохраняется. Куда направлять ось OY – Ваш выбор, зависящий от удобства решения задачи. Вариантов 2: вверх или вниз.
Приведем несколько формул, которые являются решением некоторых конкретных задач по кинематике на свободное падение по вертикали. Например, скорость, с которой упадет тело падающее с высоты h без начальной скорости:
Время падения тела с высоты h без начальной скорости:

Максимальная высота на которую поднимется тело, брошенное вертикально вверх с начальной скоростью v 0 , время подъема этого тела на максимальную высоту, и полное время полета (до возвращения в исходную точку):
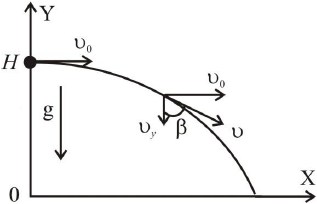
При горизонтальном броске с начальной скоростью v 0 движение тела удобно рассматривать как два движения: равномерное вдоль оси ОХ (вдоль оси ОХ нет никаких сил препятствующих или помогающих движению) и равноускоренного движения вдоль оси OY.
Скорость в любой момент времени направлена по касательной к траектории. Ее можно разложить на две составляющие: горизонтальную и вертикальную. Горизонтальная составляющая всегда остается неизменной и равна v x = v 0 . А вертикальная возрастает по законам ускоренного движения v y = gt . При этом полная скорость тела может быть найдена по формулам:
![]()
![]()
При этом важно понять, что время падения тела на землю никоим образом не зависит от того, с какой горизонтальной скоростью его бросили, а определяется только высотой, с которой было брошено тело. Время падения тела на землю находится по формуле:

Пока тело падает, оно одновременно движется вдоль горизонтальной оси. Следовательно, дальность полета тела или расстояние, которое тело сможет пролететь вдоль оси ОХ, будет равно:
Угол между горизонтом и скоростью тела легко найти из соотношения:

Также иногда в задачах могут спросить о моменте времени, при котором полная скорость тела будет наклонена под определенным углом к вертикали . Тогда этот угол будет находиться из соотношения:

Важно понять, какой именно угол фигурирует в задаче (с вертикалью или с горизонталью). Это и поможет вам выбрать правильную формулу. Если же решать эту задачу координатным методом, то общая формула для закона изменения координаты при равноускоренном движении:
![]()
Преобразуется в следующий закон движения по оси OY для тела брошенного горизонтально:
При ее помощи мы можем найти высоту на которой будет находится тело в любой момент времени. При этом в момент падения тела на землю координата тела по оси OY будет равна нулю. Очевидно, что вдоль оси OХ тело движется равномерно, поэтому в рамках координатного метода горизонтальная координата изменятся по закону:
Максимальная высота подъема при броске под углом к горизонту (относительно начального уровня):

Время подъема до максимальной высоты при броске под углом к горизонту:

Дальность полета и полное время полета тела брошенного под углом к горизонту (при условии, что полет заканчивается на той же высоте с которой начался, т.е. тело бросали, например, с земли на землю):

Минимальная скорость тела брошенного под углом к горизонту – в наивысшей точке подъёма, и равна:
Максимальная скорость тела брошенного под углом к горизонту – в моменты броска и падения на землю, и равна начальной. Это утверждение верно только для броска с земли на землю. Если тело продолжает лететь ниже того уровня, с которого его бросали, то оно будет там приобретать все большую и большую скорость.
Движение тел можно описывать в различных системах отсчета. С точки зрения кинематики все системы отсчета равноправны. Однако кинематические характеристики движения, такие как траектория, перемещение, скорость, в разных системах оказываются различными. Величины, зависящие от выбора системы отсчета, в которой производится их измерение, называют относительными. Таким образом, покой и движение тела относительны.
Таким образом, абсолютная скорость тела равна векторной сумме его скорости относительно подвижной системы координат и скорости самой подвижной системы отсчета. Или, другими словами, скорость тела в неподвижной системе отсчета равна векторной сумме скорости тела в подвижной системе отсчета и скорости подвижной системы отсчета относительно неподвижной.
Движение тела по окружности является частным случаем криволинейного движения. Такой вид движения также рассматривается в кинематике. При криволинейном движении вектор скорости тела всегда направлен по касательной к траектории. То же самое происходит и при движении по окружности (см. рисунок). Равномерное движение тела по окружности характеризуется рядом величин.

Период – время, за которое тело, двигаясь по окружности, совершает один полный оборот. Единица измерения – 1 с. Период рассчитывается по формуле:
Частота – количество оборотов, которое совершило тело, двигаясь по окружности, в единицу времени. Единица измерения – 1 об/с или 1 Гц. Частота рассчитывается по формуле:
В обеих формулах: N – количество оборотов за время t . Как видно из вышеприведенных формул, период и частота величины взаимообратные:
![]()
При равномерном вращении скорость тела будет определяется следующим образом:
![]()
где: l – длина окружности или путь, пройденный телом за время равное периоду T . При движении тела по окружности удобно рассматривать угловое перемещение φ (или угол поворота), измеряемое в радианах. Угловой скоростью ω тела в данной точке называют отношение малого углового перемещения Δφ к малому промежутку времени Δt . Очевидно, что за время равное периоду T тело пройдет угол равный 2π , следовательно при равномерном движении по окружности выполняются формулы:
![]()
Угловая скорость измеряется в рад/с. Не забывайте переводить углы из градусов в радианы. Длина дуги l связана с углом поворота соотношением:
Связь между модулем линейной скорости v и угловой скоростью ω :
![]()
При движении тела по окружности с постоянной по модулю скоростью изменяется только направление вектора скорости, поэтому движение тела по окружности с постоянной по модулю скоростью является движением с ускорением (но не равноускоренным), так как меняется направление скорости. В этом случае ускорение направлено по радиусу к центру окружности. Его называют нормальным, или центростремительным ускорением , так как вектор ускорения в любой точке окружности направлен к ее центру (см. рисунок).

на этом сайте. Для этого нужно всего ничего, а именно: посвящать подготовке к ЦТ по физике и математике, изучению теории и решению задач по три-четыре часа каждый день. Дело в том, что ЦТ это экзамен где мало просто знать физику или математику, нужно еще уметь быстро и без сбоев решать большое количество задач по разным темам и различной сложности. Последнему научиться можно только решив тысячи задач.
Успешное, старательное и ответственное выполнение этих трех пунктов позволит Вам показать на ЦТ отличный результат, максимальный из того на что Вы способны.
Если Вы, как Вам кажется, нашли ошибку в учебных материалах, то напишите, пожалуйста, о ней на почту. Написать об ошибке можно также в социальной сети (). В письме укажите предмет (физика или математика), название либо номер темы или теста, номер задачи, или место в тексте (страницу) где по Вашему мнению есть ошибка. Также опишите в чем заключается предположительная ошибка. Ваше письмо не останется незамеченным, ошибка либо будет исправлена, либо Вам разъяснят почему это не ошибка.
Что такое кинематика? С ее определением впервые начинают знакомиться ученики средних школ на уроках физики. Механика (кинематика является одним из ее разделов) сама составляет большую часть это науки. Обычно ее преподносят ученикам первой в учебниках. Как мы и сказали, кинематика является подразделом механики. Но раз уж речь зашла о ней, то поговорим об этом несколько подробнее.
Само слово “механика” имеется греческое происхождение и дословно переводится как искусство построения машин. В физике она считается разделом, который изучает движение так называемых нами материальных тел в разноразмерных пространствах (то есть, движение может происходить в одной плоскости, на условной координатной сетке или же в Изучение взаимодействия между материальными точками - одна из задач, которые выполняет механика (кинематика - исключение их этого правила, поскольку она занимается моделированием и разбором альтернативных ситуаций без учета воздействия силовых параметров). При всем этом следует отметить, что соответствующий раздел физики подразумевает под движением изменение положения тела в пространстве с течением времени. Применимо такое определение не только к материальным точкам или телам в целом, но и к их частям.

Название этого также имеет греческое происхождение и дословно переводится как “двигаться”. Таким образом, мы получаем первоначальный, еще не сформированный по-настоящему ответ на вопрос о том, что такое кинематика. В данном случае можно говорить о том, что раздел изучает математические способы описания тех или иных непосредственно идеализированных тел. Речь идет о так называемых абсолютно твердых телах, об идеальных жидкостях, и, конечно же, о материальных точках. Очень важно помнить о том, что при применении описания причины движения не учитываются. То есть, рассмотрению не подлежат такие параметры, как масса тела или сила, которая оказывает влияние на характер его движения.

Они включают в себя такие понятие, как время и пространство. В качестве одного из наиболее простых примеров можно привести ситуацию, когда, допустим, материальная точка движется по окружности определенного радиуса. В этом случае кинематика будет приписывать обязательное существование такой величины, как центростремительное ускорение, которое по вектору направлено от самого тела к центру окружности. То есть, в любой из моментов времени будет совпадать с радиусом окружности. Но даже в этом случае (при наличии центростремительного ускорения) кинематика не будет указывать на то, какую природу имеет та сила, которая стала причиной его появления. Это уже действия, которые разбирает динамика.

Итак, ответ на то, что такое кинематика, мы, по сути, дали. Она представляет собой раздел механики, который изучает способы описания движения идеализированных объектов без изучения силовых параметров. Теперь же поговорим о том, какой может быть кинематика. Первый ее тип - классическая. В ней принято считать абсолютными пространственные и временные характеристики определенного вида движения. В роли первых предстают длины отрезков, в роли последних - временные промежутки. Иными словами, можно говорить о том, что эти параметры остаются независимыми от выбора системы отсчета.

Вторым типом кинематики является релятивистская. В ней между двумя соответствующими событиями временные и пространственные характеристики могут изменяться, если осуществляется переход из одной системы отсчета в другую. Одновременность происхождения двух событий в таком случае также принимает исключительно относительный характер. В этом виде кинематики два отдельных понятия (а речь идет о пространстве и времени) сливаются в одно. В ней величина, которую обычно называют интервалом, становится инвариантной относительно Лоренцовских преобразований.

Нам удалось разобраться с понятием и дать ответ на вопрос о том, что такое кинематика. Но какова же была история ее возникновения как подраздела механики? Вот об этом сейчас и следует поговорить. Достаточно продолжительное время все понятия этого подраздела базировались на работах, которые были написаны еще самим Аристотелем. В них существовали соответствующие утверждения о том, что скорость тела при падении прямо пропорционально численному показателю веса того или иного тела. Также упоминалось, что причиной движения является непосредственно сила, а при ее отсутствии ни о каком движении и речи быть не может.

Работами Аристотеля в конце шестнадцатого века заинтересовался знаменитый ученый Галилео Галилей. Он принялся изучать процесс свободного падения тела. Можно упомянуть о его опытах, которые он проводил на Пизанской Башне. Также ученый изучал процесс инерции тел. В конце концов Галилею удалось доказать, что в своих работах Аристотель ошибался, и он допустил целый ряд ошибочных выводов. В соответствующей книге Галилей изложил итоги проведенных работ с доказательствами ошибочности выводов Аристотеля.
Современная кинематика, как считается нынче, зародилась в январе 1700-ого года. Тогда перед Французской Академией наук выступил Пьер Вариньон. Он же привел первые понятия ускорения и скорости, написав и объяснив их в дифференциальном виде. Немного позднее на вооружение некоторые кинематические представления к сведению принял и Ампер. В восемнадцатом веке он использовал в кинематике так называемое вариационное исчисление. Специальная теория относительности, созданная еще позже, показывала, что пространство, как и время, не абсолютно. В то же время указывалось, что скорость может быть принципиально ограниченной. Именно такие основания подтолкнули кинематику к развитию в рамках и понятиях так называемой релятивистской механики.
Основы кинематики включают в себя несколько величин, которые применяются не только в теоретическом плане, но и имеют место в практических формулах, применяемых при моделировании и решении определенного спектра задач. Познакомимся с этими величинами и понятиями подробнее. Начнем, пожалуй, с последних.
1) Механическое движение. Определяется как изменения пространственного положения определенного идеализированного тела относительно других (материальных точек) в ходе изменения временного интервала. При это на тела, которые упоминаются, имеют между собой соответствующие силы взаимодействия.
2) Система отсчета. Кинематика, определение которой мы дали ранее, базируется на использовании системы координат. Наличие ее вариаций является одним из необходимых условий (вторым условием является применение приборов или средств для измерения времени). Вообще система отсчета необходима для успешного описания того или иного вида движения.
3) Координаты. Являясь условным мнимым показателем, неразрывно связанным с предыдущим понятием (системой отсчета), координаты представляют собой не что иное, как способ, при помощи которого определяется положение идеализированного тела в пространстве. При этом для описания могут быть применены цифры и специальные символы. Координатами нередко пользуются разведчики и артиллеристы.
4) Радиус-вектор. которую на практике применяют для задания положения идеализированного тела с оглядкой на первоначальное положение (и не только). Проще говоря, берется определенная точка и она фиксируется для условности. Чаще всего это начало координат. Так вот, после этого, допустим, идеализированное тело из это точки начинает движение по свободной произвольной траектории. В любой момент времени мы можем соединить положение тела с началом координат, и полученная прямая будет представлять собой не что иное как радиус-вектор.
5) Раздел кинематики использует понятие траектории. Она представляет собой обыкновенную непрерывную линию, которая создается в ходе движения идеализированного тела при произвольном свободном движении в разноразмерном пространстве. Траектория, соответственно, может быть прямолинейной, круговой и ломанной.
6) Кинематика тела неразрывно связана с такой физической величиной как скорость. На деле это векторная величина (очень важно помнить о том, что понятие скалярной величины к ней применимо только в исключительных ситуациях), которая будет давать характеристику быстроты изменения положения идеализированного тела. Векторной ее принято считать в силу того, что скорость задает направление происходящего движения. Для использования понятия необходимо применять систему отсчета, как и говорилось ранее.
7) Кинематика, определение которой рассказывает о том, что она не рассматривает причины, вызывающие движение, в определенных ситуациях рассматривает и ускорение. Оно также является векторной величиной, которая показывает, насколько интенсивно будет изменяться вектор скорости идеализированного тела при альтернативном (параллельном) изменении единицы времени. Зная одновременно, в какую сторону направлены оба вектора - скорости и ускорения - можно сказать о том, какой характер имеет движение тела. Оно может быть либо равноускоренным (вектора совпадают), либо равнозамедленным (вектора разнонаправлены).
8) Угловая скорость. Еще одна В принципе, ее определение совпадает с аналогичным, которое мы дали ранее. На самом деле, разница заключается только в том, что ранее рассмотренный случай происходил при движении по прямолинейной траектории. Тут же мы имеем круговое движение. Это может быть аккуратная окружность, а также эллипс. Аналогичное понятие дается и для углового ускорения.
Для решения практических задач, связанных с кинематикой идеализированных тел, существует целый перечень самых разных формул. Они позволяют определить пройденное расстояние, мгновенную, начальную конечную скорость, время, за которое тело прошло ту или иную дистанцию, а также многое другое. Отдельным случае применения (частным) являются ситуации с смоделированным свободным падением тела. В них ускорение (обозначается буквой а) заменяется на ускорение свободного падения (буква g, численно равняется 9,8 м/с^2).
Итак, что же мы выяснили? Физика - кинематика (формулы которой выводятся одна из другой) - этого раздела применяется для описания движения идеализированных тел без учета силовых параметров, становящихся причинами возникновения соответствующего движения. Читатель всегда может ознакомиться с данной темой подробнее. Физика (тема “кинематика”) является очень важной, поскольку именно она дает основные понятия о механике как глобальном разделе соответствующей науки.
Определение 1
Кинематика − это раздел механики, который рассматривает движение тел без объяснения вызывающих его причин.
Определение 2
Механическое движение тела − это изменение положения данного тела в пространстве относительно других тел во времени.
Как мы сказали, механическое движение тела относительно. Движение одного и того же тела относительно разных тел может быть разным.
Определение 3
Для характеристики движения тела указывается, по отношению к какому из тел рассматривается это движение. Это будет тело отсчета .
Определение 4
Система отсчета − система координат, которая связана с телом отсчета и временем для отсчета. Она позволяет определить положение передвигающегося тела в любой отрезок времени.
В С И единицей длины выступает метр, а единицей времени – секунда.
У каждого тела есть определенные размеры. Разные части тела расположены в разных пространственных местах. Но в большинстве задач механики не нужно указывать положение отдельных частей тела. Если размеры тела маленькие в сравнении с расстояниями до остальных тел, тогда заданное тело считается его материальной точкой. Таким образом поступают при изучении перемещения планет вокруг Солнца.
Определение 5
Механическое движение называют поступательным , в случае если все части тела перемещаются одинаково.
Пример 1
Поступательное движение наблюдается у кабин в аттракционе «Колесо обозрения» или у автомобиля на прямолинейном участке пути.
При поступательном движении тела его также рассматривают в качестве материальной точки.
Определение 6
Материальная точка − это тело, размерами которого при заданных условиях можно пренебречь.
Термин “материальная точка” имеет важное значение в механике.
Определение 7
Траектория движения тела − некоторая линия, которую тело или материальная точка описывает, перемещаясь во времени от одной точки до другой.
Местонахождение материальной точки в пространстве в любой временной отрезок (закон движения) определяют, используя зависимость координат от времени x = x (t) , y = y (t) , z = z (t) или зависимость от времени радиус-вектора r → = r → (t) , проведенного от начала координат до заданной точки. Наглядно это представлено на рисунке 1 . 1 . 1 .
Рисунок 1 . 1 . 1 . Определение положения точки при помощи координат x = x (t) , y = y (t) и z = z (t) и радиус-вектора r → (t) , r 0 → – радиус-вектор положения точки в начальный момент времени.
Определение 8
Перемещение тела s → = ∆ r → = r → - r 0 → – это направленный отрезок прямой, который соединяет начальное положение тела с его дальнейшим положением. Перемещение является векторной величиной.
Пройденный путь l равняется длине дуги траектории, преодоленной телом за определенное тело t . Путь является скалярной величиной.
Если движение тела рассматривается в течение довольно короткого отрезка времени, тогда вектор перемещения оказывается направленным по касательной к траектории в заданной точке, а его длина равняется преодоленному пути.
В случае небольшого промежутка времени Δ t преодоленный телом путь Δ l практически совпадает с модулем вектора перемещения ∆ s → . При перемещении тела по криволинейной траектории модуль вектора движения все время меньше пройденного пути (рисунок 1 . 1 . 2).

Рисунок 1 . 1 . 2 . Пройденный путь l и вектор перемещения
∆ s → при криволинейном движении тела.
a и b – это начальная и конечная точки пути.
Для описания движения в физике введено понятие средней скорости: υ → = ∆ s → ∆ t = ∆ r → ∆ t .
Физиков больше интересует формула не средней, а мгновенной скорости, которая рассчитывается как предел, к которому стремится средняя скорость на бесконечно маленьком промежутке времени Δ t , то есть υ → = ∆ s → ∆ t = ∆ r → ∆ t ; ∆ t → 0 .
В математике данный предел называется производная и обозначается d r → d t или r → ˙ .
Мгновенная скорость υ → тела в каждой точке криволинейной траектории направлена по касательной к траектории в заданной точке. Отличие между средней и мгновенной скоростями демонстрирует рисунок 1 . 1 . 3 .

Рисунок 1 . 1 . 3 . Средняя и мгновенная скорости. ∆ s 1 → , ∆ s 2 → , ∆ s 3 → – перемещения за время ∆ t 1 < ∆ t 2 < ∆ t 3 соответственно. При t → 0 , υ → с р → υ → .
При перемещении тела по криволинейной траектории скорость υ → меняется по модулю и по направлению. Изменение вектора скорости υ → за какой-то маленький промежуток времени Δ t задается при помощи вектора ∆ υ → (рисунок 1 . 1 . 4).
Вектор изменения скорости ∆ υ → = υ 2 → - υ 1 → за короткий промежуток времени Δ t раскладывается на 2 составляющие: ∆ υ r → , которая направлена вдоль вектора υ → (касательная составляющая) и ∆ υ n → , которая направлена перпендикулярно вектору υ → (нормальная составляющая).

Рисунок 1 . 1 . 4 . Изменение вектора скорости по величине и по направлению. ∆ υ → = ∆ υ → r + ∆ υ → n – изменение вектора скорости за промежуток времени Δ t .
Определение 9
Мгновенное ускорение тела a → – это предел отношения небольшого изменения скорости ∆ υ → к короткому отрезку времени Δ t , в течение которого изменялась скорость: a → = ∆ υ → ∆ t = ∆ υ → τ ∆ t + ∆ υ → n ∆ t ; (∆ t → 0) .
Направление вектора ускорения a → , при криволинейном движении, не совпадает с направлением вектора скорости υ → . Составляющие вектора ускорения a → – это касательные (тангенциальные) a → τ и нормальные a → n ускорения (рисунок 1 . 1 . 5).

Рисунок 1 . 1 . 5 . Касательное и нормальное ускорения.
Касательное ускорение показывает, как быстро меняется скорость тела по модулю: a τ = ∆ υ ∆ t ; ∆ t → 0 .
Вектор a → τ направлен по касательной к траектории.
Нормальное ускорение показывает, как быстро скорость тела меняется по направлению.
Пример 2
Представим криволинейное движение, как движение по дугам окружностей (рисунок 1 . 1 . 6).

Рисунок 1 . 1 . 6 . Движение по дугам окружностей.
Нормальное ускорение находится в зависимости от модуля скорости υ и радиуса R окружности, по дуге которой тело перемещается в определенный момент времени: a n = υ 2 R .
Вектор a n → все время направлен к центру окружности.
По рисунку 1 . 1 . 5 видно, модуль полного ускорения равен a = a τ 2 + a n 2 .
Итак, основные физические величины в кинематике материальной точки – это пройденный путь l , перемещение s → , скорость υ → и ускорение a → .
Путь l – скалярная величина.
Перемещение s → , скорость υ → и ускорение a → – векторные величины.
Для того чтобы задать какую-нибудь векторную величину, необходимо задать ее модуль и определить направление. Вектора подчиняются математическим правилам: их можно проектировать на координатные оси, складывать, вычитать и др.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Кинематика – часть теоретической механики, в которой изучаются движения материальных тел без учета их масс и действующих на них сил.
Когда в механике говорят о движении тела, то подразумевают под этим изменение с течением времени его положения в пространстве по отношению к другим телам.
Обычно с телом, по отношению к которому изучают движение, связывают какую-нибудь систему координат, которую вместе с выбранным способом измерения времени называют системой отсчета. Если координаты всех точек тела в выбранной системе отсчета остаются неизменными во времени, то тело находится в покое.
Если рассматривается движение тела по отношению к условно неподвижной системе отсчета, то движение называют абсолютным
; движение тела по отношению к подвижной системе отсчета называют относительным
.
В мире все находится в непрерывном движении, поэтому все движения являются относительными, однако условно можно представить себе и абсолютное движение, например, движение по отношению к Земле.
Итак, движение тело совершается в пространстве с течением времени. Пространство и время, как и движение, согласно учению диалектического материализма – формы существования материи.
Классическая механика полагает, что пространство и время имеют абсолютный, независимый друг от друга характер, и что их свойства не зависят от распределения и движения материи.
Такая точка мировоззрения господствовала в науке до начала XX века, пока гениальный А. Эйнштейн (1879-1955) не поставил ее под сомнение своей теорией относительности. Этот человек сломал вековое представление человечества о самом главном – об абсолютности времени и пространства. Теория относительности Эйнштейна – это современная физическая теория пространства и времени, связывающая эти доселе незыблемые независимые постулаты с движением, массой и энергией.
До А. Эйнштейна считалось, что все в мире относительно. Если тело движется по отношению к какой-либо подвижной системе, то оно имеет другой характер движения по отношению к той системе, относительно которой движется данная система. Это утверждение являлось одним из китов, на которых восседала наука до начала прошлого века.
Теория относительности Эйнштейна основывается на том, что скорость света является постоянной величиной, не зависящей от скорости источника этого света. На основании этого противоречащего здравому смыслу вывода можно утверждать, что и пространство, и время – суть понятия относительные, зависящие от скорости света.
Гениальность Эйнштейна заключается в том, что он увидел и объял неочевидное. Современная физика, на основании множества экспериментов, опытов и исследований полностью подтвердила его теорию.
Тем не менее, несмотря на открытия Эйнштейна, классическая механика не потеряла свою актуальность, так как при скоростях движения, далеких от скорости света, результаты, даваемые классической механикой, ничтожно мало отличаются от результатов механики теории относительности и вполне пригодны для практики. Можно сказать, что классическая механика является частным случаем механики теории относительности, предполагающая упрощенные расчеты с допустимыми погрешностями.
Чтобы понять смысл определений кинематики следует ознакомиться с понятиями и определениями другого раздела технической механики – теорией механизмов и машин, которая занимается приложением законов теоретической механики для практических расчетов деталей, механизмов и машин.
Механизмом называется совокупность связанных между собой тел, имеющих определенные движения и служащих для передачи и преобразования движения.
Машиной
называют механизм или сочетание механизмов, служащих для преобразования энергии (энергетические машины), изменения формы, свойств, состояния и положения предмета труда (рабочие машины), или для сбора, переработки и использования информации (информационные машины).
Таким образом, любая машина состоит из одного или нескольких механизмов, но не всякий механизм является машиной, т. е. машина – понятие более широкое.
Простейшей частью любой машины является ее звено
– одно тело или неизменяемое во время работы машины сочетание группы тел.
Два звена, соединенные между собой и допускающие относительное движение, называются кинематической парой
.
Кинематические пары бывают низшие
и высшие
. Звенья низших пар соприкасаются по поверхностям (поступательные, вращательные и винтовые пары), звенья высших пар соприкасаются по линиям и точкам (зубчатые пары, подшипники качения и т. п.).
Совокупность кинематических пар называется кинематической цепью
.
Кинематические пары и цепи могут быть плоскими и пространственными. Механизм – это кинематическая цепь, у которой одно из звеньев лишено движения (закреплено). Такое звено называют станиной
или стойкой
.
Звено, вращающееся вокруг неподвижной оси, называют кривошипом
, качающееся вокруг неподвижной оси – балансиром
или коромыслом
.
Звено, совершающее сложное движение параллельно какой-то плоскости, называют шатуном
. Звено, совершающее возвратно-поступательное движение по станине или стойке, называют ползуном
.
Ведущим звеном механизма считается то, которому извне сообщается определенное движение, передаваемое посредством этого звена другим звеньям, называемым ведомыми .
Кинематика изучает закономерности относительного движения и перемещения отдельных звеньев механизмов, без учета сил, вызывающих эти движения и перемещения.
Основными физическими величинами, которыми оперирует кинематика, являются расстояние (длина) и время. Единицей измерения длины в системе СИ является метр (м) , единицей измерения времени – секунда (с) .
Знание законов движения тела означает знание законов движения каждой его точки, поэтому изучение кинематики основывается на изучении геометрии движения точки.
Траекторией точки называется множество (геометрическое место) положений движущейся точки в рассматриваемой системе отсчета. Проще говоря, траектория движения – это линия, которую описывает подвижная точка относительно выбранной системы отсчета. В зависимости от формы траектории различают прямолинейное и криволинейное движение.
Движение любой точки тела можно описать (задать) тремя способами – естественным, векторным и координатным (см. рисунок 1) .

Естественный способ
(рис. 1а)
заключается в том, что движение точки задается ее траекторией, началом отсчета и уравнением движения по этой траектории (законом движения).
В общем виде уравнение движения записывается так: s = f(t)
, где s
– расстояние от точки до начального положения (начала отсчета), являющееся функцией времени; t
– время движения точки от начального отсчета.
Зная траекторию и закономерность (уравнение) движения точки по этой траектории, можно в любой момент времени определить, где она находится.
При своем движении точка проходит некоторый путь, который также является функцией времени. Следует отметить, что путь, пройденный точкой, совпадает с расстоянием от начала отсчета лишь в том случае, если траектория движения точки представляет собой прямую линию, и точка движется по ней в одном направлении, а начало движения точки совпадает с началом отсчета.
Векторный способ (рис. 1б) основывается на том, что положение точки в пространстве однозначно определяется радиусом-вектором r , проведенным из некоторого неподвижного центра к данной точке. При этом положение точки в данный момент времени определяется направлением и модулем вектора. Математически функция изменения радиуса-вектора от времени записывается так:
Координатный способ (рис. 1в) заключается в том, что движение точки задается движением ее проекций вдоль осей координат. В общем виде уравнение движения точки можно записать следующим образом:
x = f(t), y = f 1 (t), z = f 2 (t).
Зная уравнения движения точки в координатной форме, можно, подставив в эти уравнения время, определить положение проекций точки, а следовательно, и самой точки в любой момент времени.
Если точка движется в плоскости, то для определения ее местоположения в данный момент времени достаточно знать две координаты, если движение происходит по прямой – достаточно одной координаты.
1. Механическое движение – изменение положения тела в пространстве относительно других тел с течением времени.
2. Материальная точка (МТ) – тело, размерами которого можно пренебречь при описании его движения.
3. Траектория – линия в пространстве, вдоль которой движется МТ (совокупность последовательных положений МТ, занимаемых ею в процессе движения).
4. Система отсчета (СО) включает в себя:
· тело отсчета;
· систему координат, связанную с этим телом;
· прибор для измерения времени, включая выбор начальной точки отсчета времени (при этом, если используются несколько часов, то они должны быть синхронизированы).
5. Основная (обратная) задача кинематики
: найти закон (уравнения) движения тела в заданной системе отсчета.
Например, уравнения движения тела, брошенного под углом к горизонту, выглядят так:
При этом все остальные задачи, нахождение пути, высоты подъема, дальности, времени являются вспомогательными и, как правило, легко решаются на основании уравнений движения. Прямая задача кинематики заключается в вычислении параметров движения по заданным уравнениям движения.
6. Поступательное движение однозначно определяется по одному из следующих признаков:
· все точки тела движутся по траекториям одинакового вида;
· любой отрезок прямой линии, проведенный внутри тела, при поступательном движении остается параллельным самому себе;
· все точки тела движутся с одинаковой скоростью.
7. Вращательное движение – такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения
Плоское движение твердого тела можно разложить на поступательное и вращательное движение.
8. Путь – это длина траектории (измеренная с учетом кратности прохождения отдельных ее участков).
9. Средняя скорость – это векторная физическая величина, равная отношению перемещения к промежутку времени, за который это перемещение осуществлено.
10. Среднее значение модуля скорости (средняя путевая скорость) – это скалярная физическая величина, равная отношению пути к промежутку времени, за который пройден этот путь.
11. Мгновенная скорость -
это векторная физическая величина, равная первой производной вектора перемещения (или радиус-вектора) по времени: ![]() ,
,
или , в проекциях получаем: и т.д.
12. Ускорение- - это векторная физическая величина, равная первой производной вектора скорости по времени:
![]() , в проекциях получаем: и т.д.
, в проекциях получаем: и т.д.
Таблица типов движения:
Таблица 6
| Равномерное движение: | Равнопеременное движение: | ||
| Прямолинейное равномерное | Криволинейное равномерное | Равноускоренное увеличивается | Равнозамедленное уменьшается |
13. Уравнение (закон) равнопеременного движения:
![]() ,
или в координатной форме:
,
или в координатной форме:![]() .
.
14. Уравнение (закон) изменения скорости
при равнопеременном движении: , или в координатной форме: ![]()
15. Формула для средней скорости
при равнопеременном движении:
.
|
 Преобразования Галилея, формула сложения скоростей:
Преобразования Галилея, формула сложения скоростей:17. Формула для пути с исключенным временем: .
Основные определения кинематики вращательного движения:
18. Период –
это значение интервала времени, за который тело совершает полный оборот по циклической траектории.
Частота – величина обратная периоду, , .
Число оборотов в секунду равно частоте, но обозначается n, .
19. Угловая скорость
– скалярная величина, равная первой производной угла поворота по времени, . Далее мы введем угол и угловую скорость как векторные величины. При равномерном движении ![]() .
.
20. Ускорение при криволинейном движении – имеет две составляющие: тангенциальную, отвечающую за изменение скорости по величине и нормальную, или центростремительную, отвечающую за искривление траектории

![]()
С учетом выражения ![]()
![]()
окончательно получаем: , ![]() , где -единичный вектор, направленный к центру кривизны, - единичный вектор вдоль касательной к траектории. Более компактный вывод выглядит так:
, где -единичный вектор, направленный к центру кривизны, - единичный вектор вдоль касательной к траектории. Более компактный вывод выглядит так: ![]() , следовательно, и .
, следовательно, и .
Типичные
 задачи кинематики:
задачи кинематики:
Задача №2.
Чему равна скорость точек A,B,C,D на диске, рис.4, катящемся по плоскости без проскальзывания (чистое качение).
Изобразите геометрическое место точек диска, у которых скорость по модулю равна скорости поступательного движения диска.
Задача № 3. Два автомобиля едут в попутном направлении с заданной скоростью.На какой минимальной дистанции необходимо держаться второму автомобилю, чтобы обезопасить себя от попадания камней, вырывающихся из-под колес первого автомобиля. Под каким углом к горизонту в системе отсчета, связанной с землей вылетают самые опасные камни? Сопротивлением воздуха пренебречь.
Ответ: , - вперед по ходу движения.
Задача № 4. Критическое для тела человека кратковременное ускорение (при котором есть шанс избежать серьезных травм) равно . Каким должен быть минимальный тормозной путь, если начальная скорость автомобиля равнялась 100км/ч?
Задача № 5. (№1.23 из сборника задач ).Точка движется, замедляясь, по прямой с ускорением, модуль которого зависит от ее скорости по закону , где - положительная постоянная. В начальный момент скорость точки равна . Какой путь она пройдет до остановки? За какое время этот путь будет пройден?
Флаг Красной армии Киевское высшее общевойсковое командное дважды...

Матвейчев Олег – политолог, политконсультант, писатель, философ, эксперт...

Задали вопрос про спалившихся укроботов, которые выдают себя за русских. Есть...